J5-Delta
Delta Robot Component for Johnny-Five
Usage
var five = ;var Deltabot = ;var board = ; board;Constructor Parameters
| Property | Type | Value/Description | Default | Required |
|---|---|---|---|---|
| pins | Array | An array of three pins id's with servos attached | yes | |
| startAt | Number | Any number between 0-180. Degrees to initialize the servos at. | 5 | no |
| tapDepth | Number | The depth at which to plunge the end effector for a tap or draw. | -160 | no |
| servoSpeed | Number | Number of seconds it takes your servo to move 60 degrees, used to calculate movement time | 0.40 | no |
| dimensions | Object | Collection of dimensions describing the geometry of the delta robot you want to control. | no | |
| type | String | The name of a known delta robot configuration. If you don't specify this, you should specify dimensions. Valid values: 'tapster', 'junky' |
Dimensions
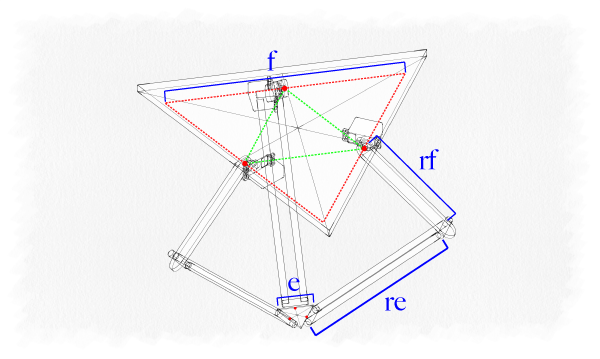
| Variable | Description |
|---|---|
| f | base length |
| e | end effector length |
| rf | bicep length |
| re | forearm length |
If you have a custom delta robot you will need to make a few measurements of the geometry and pass it in. Normally, these measurements should be in millimeters. If your design is open source or commonly available, please consider sending a pull request to add it as a named configuration to configurations.js!
Example initializing with custom dimensions:
var delta = pins: 9 10 11 dimensions: f: 163 e: 8025 rf: 12875 re: 155 ;API
home()
Move all of the servos to their home position as specififed by startAt at Deltabot initialization.
deltabot;moveTo(coords, [callback])
Move the end effector to the specified X, Y and Z coordinates. Callback is triggered when the movement is done.
deltabot;Note on coordinate system: The coordinate system origin (0,0,0) starts a point directly centered between the three motor axes. Therefore, the Z coordinate of the end effector will always be below that and negative.
getPosition([angles])
Get the current position of the end effector through a forward kinematic calculation. If you do not specify the angles, it will use the last known servo angles.
Note: The position returned by getPosition() will most likely differ from what you passed in to moveTo(). This is due to the limited range of motion on a hobby servo. The position returned by getPosition() is closer to the true position.
deltabot;deltabot; // [ 0, 19.61168100866987, -20.1826220029087, -140.14643590955427 ]getServoAngles()
Get the current positions of each of the three servo motors in degrees.
deltabot;deltabot; // [ 22, 17, 56 ]tap(x, y, [callback])
Tap at the specified X and Y coordinates, plunging to a depth specified by the tapDepth option.
deltabot;draw(coords, [callback])
Draw by dragging the end effector at tapDepth between all of the X,Y coordinates in the coords paramter.
// Draw a 40mm box starting at position 10,10deltabot;