nrf24 - RF24 Radios in the node way

![]()



This module enable nodejs (using javascript syntactic sugar) to manage nRF24L01(+) radios on linux-based one board computers (RaspberryPi,OrangePi,BeagleBone,Edison,CHIP...). Wide support for SBCs is provided by the RF24 library supporting Generic Linux devices with SPIDEV, MRAA, RPi native via BCM* chips, WiringPi or using LittleWire.
This module is based on the outstanding C++ library optimized by @tmrh20. Please consult the project documentation nRF24 here for additional details.
This project has a sister project to enable Node-RED to use nRF24L01(+) radios in a seamless way with visual flow programming. Check out the repository here.
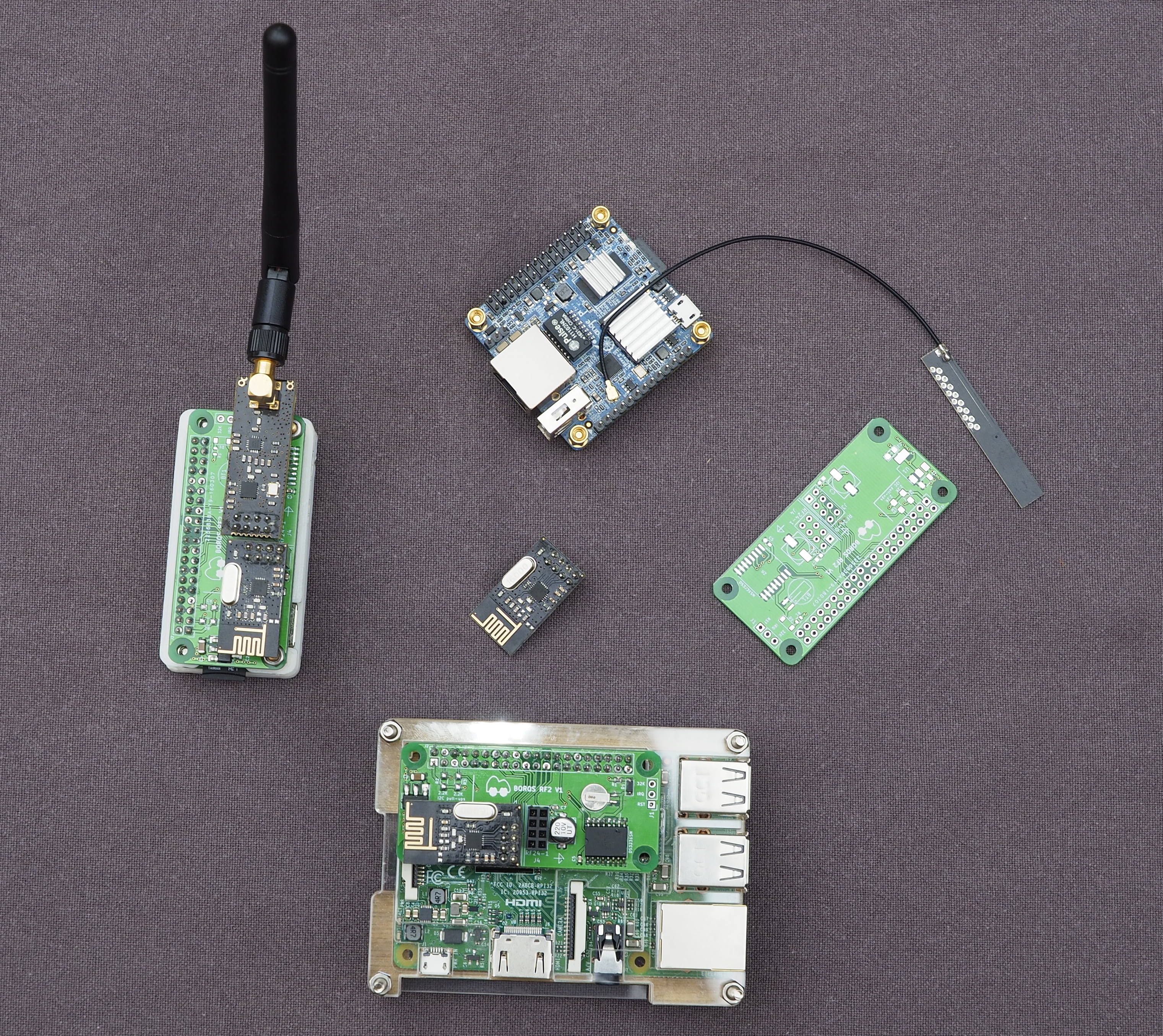
nRF24L01 present several problems when connected using long wires and poorly regulated power sources. To avoid this kind of problems is recommended to use break-out boards. For standard Pi-like computers this Hat/pHat enable a simple hardware integration with minimal configuration. Full documentation of this openHw project can be consulted here.
BorosRF2 hat:
If you like this project and want to support the development and maintenance please consider a donation.

Overview
This nodejs add-on has the following features:
- Basic & streaming RF24 radio support.
- Create a RF24Mesh network as master or Join to a RF24Mesh as node.
- Provide a RF24Gateway directly on nodeJs to provide TCP/IP connectivity for your radios. [In development]
Installation
Prerequisites:
Nodejs version
The module requires node js version >=12. This requeriment can change as nodejs new versions of are released.
SPI enabled & Gpio Access
In order to communicate with the radio linux kernel need to have SPI enabled and direct access to board GPIOs. In some distributions SPI interface is disabled by default so it's needed to be enabled.
In Rpi Raspbian it can be done using raspi-config or modifying /boot/config.txt. Check here for more details.
For Rpi DietPi (recommended distribution for headless projects) the procedure is similar but using the /DietPi/config.txt.
Gpio access require access to sysfs under the path /sys/class/gpio/. In common linux distributions simply adding the user executing the nodejs application to the gpio group
check usermodto do it.
In Rpi alternatives based on armbian such OrangePi, NaoPi,... please consult armbian documentation here.
For other SBCs or distributions consult who to activate SPI and Gpios.
If using Spidev driver (see below) the user executing the nodejs application need to have access to the /dev/spidevX.X files. This can be done in typical distribution adding the user to the spi group.
A working nRF24L01(+) radio
A nRF24L01(+) radio must be wired to your system and tested for connection. RF24* libs have several testing examples that can be use for for that purpose.
An example of wiring for an OrangePi Zero(using SPI 1 bus) and Rpi (using SPI 0 bus) is show in the following table:
| PIN NRF24L01 | OrangePi Zero Pin |
|---|---|
| 1 GND | opi-gnd (25) |
| 2 VCC | opi-3v3 (17) |
| 3 CE | opi-PA6 (7) (selectable) |
| 4 CSN | opi-spi1cs0 (24) |
| 5 SCK | opi-spi1Sck (14) |
| 6 MOSI | opi-spi1Mosi (19) |
| 7 MISO | opi-spi1Miso (16) |
| 8 IRQ | not connected / optional |
| PIN NRF24L01 | RPI RPi -P1 Connector |
|---|---|
| 1 GND | rpi-gnd (25) |
| 2 VCC | rpi-3v3 (17) |
| 3 CE | rpi-gpio22 (15) |
| 4 CSN | rpi-gpio8 (24) |
| 5 SCK | rpi-sckl (23) |
| 6 MOSI | rpi-mosi (19) |
| 7 MISO | rpi-miso (21) |
| 8 IRQ | not connected / optional |
Understand your wiring is critical for hardware initialization as there are not hardware discovery mechanism implemented in the library.
For better performance and lower CPU usage is recommended to connect also the PIN 8 (IRQ line) an additional GPIO line. Check-out the config API addtional information about IRQ management.
Install the nrf24 package
Use NPM as with other modules:
cd <your project>
npm install nrf24 --saveThis will add nrf24 to your project and save the dependence in your package.json.
Starting from version 0.2-beta the module is build with prebuild versions for stable lts versions of nodejs for armv7(32bit) and armv8 (64bit) platforms.
disclaimer: This package is a C++ native add-on that may require compilation on your linux system. Please assure that you have the proper "build-essential","base-devel" packages installed according to your linux distribution.
By default the packages install will build the node module with SPIDEV driver. If other driver is preferred the install command must provide the env variable DRIVER=<driver> before the npm install command. For example if the driver to use is RPi install command is:
DRIVER=RPi npm install nrf24 --saveThis may not work for some available drivers. The only tested DRIVER is SPIDEV.
Usage
Basic RF24
Enable nodejs have basic communication over nRF24L01(+) radios in a simple javascript code:
...
const nrf24=require("nrf24"); // Load de module
// or
import * as nrf24 from 'nrf24'; // Load with import notation notation.
// Init the radio
var rf24= new nrf24.nRF24(<CE gpio>,<CS gpio>);
rf24.begin();
// Configure the radio
rf24.config({
PALevel: nrf24.RF24_PA_LOW,
DataRate: nrf24.RF24_1MBPS,
... // Other config
});
// Register Reading pipes
var pipe=rf24.addReadPipe("0x65646f4e31",true) // listen in pipe "0x65646f4e31" with AutoACK enabled.
...
//up to 5 pipes can be configured
// Register callback for reading
rf24.read( function(data,n) {
// when data arrive on any registered pipe this function is called
// data -> JS array of objects with the follwing props:
// [{pipe: pipe id, data: nodejs with the data },{ ... }, ...]
// n -> number elements of data array
},function(isStopped,by_user,error_count) {
// This will be if the listening process is stopped.
});
...
// Sending data over the radio
var data=Buffer.from(<your data>); // Create a node buffer for sending data
rf24.useWritePipe("0x72646f4e31",true); // Select the pipe address to write with Autock
rf24.write(data); // send the data in sync mode
...
// Async write with callback
rf24.write(data,function(success,...){
// Callback after sending data
});
...
// If you want to stop listening
rf24.stopRead();
...
// If you want to abort pending async writes
rf24.stopWrite();
// Finally to assure that object is destroyed
// and memory freed destroy must be called.
rf24.destroy();
Streaming data
The maximun payload of NRF24 radios is 32 bytes. In order to transmit or recive streams bigger buffers of data the module offers some helpers for this operations.
Streaming data can be acomplished by using stream function:
rf24.changeWritePipe(true,2048); // Set max stream size to 2Kb
var big_buffer=Buffer.from(<data_up_to_2K>);
rf24.stream(big_buffer,function(success,tx_ok,tx_bytes,tx_req,frame_size,aborted) {
if(success) console.log("Stream ok");
else {
console.log("Transfered:"+tx_bytes+ " total:" + tx_req + " OK->" + tx_ok);
}
});Receiving streaming data:
Receiving streaming data do not require special function. read()function will receive the incoming frames. To improve perfomance incoming frames from the transmitter can be merged into a single buffer. The library will try to merge incoming frames and send then to the read() callback but is not guarteed that frames will be merged. User can configure maximun frames that are possible to merge by calling changeReadPipe()
rf24.changeReadPipe(pipenr,false,10); // Wil merge up to 10 frames with out Peformance
Starting form version 1.0-beta the improvement of perfomance is significant. To archive better maximun performance IRQ line must be configured.
Check this this page to check a baseline performed that can be archived with the library.
Failure handling
Due to wrong wiring / weak signal quality or faulty hardware the module can detect when the radio is in a inconsistent status and is not able to transmit. User can check via hasFailure() API if this condition has been detected. Recovery of this situation could require to change wiring or improve power/decoupling for the radio module or simply change the radio module.
experimental: Recovery of faulty hardware is supported in a experimental way by reseting the radio. If a radio is failing randomly but it perform well the user can call restart() API to reset the radio. All configuration will be restarted acording to user. Faliures can be only detected after writing.
RF24Mesh
TODO documentation ....
RF24RF24Gateway
TODO documentation ....
API
RF24 API
The module offer a simplified and basic functionality of the nRF24 library. Only basic operations are supported. Features such DynamicPayloads, AckPayloads, ... are not supported.
RF24(ce,cs,spi_speed=10000000) constructor
Create RF24 object that match the wiring. ce and cs values will vary depending on your hardware and build o RF24 libs. Please refer to R24libs documentation here for your specific case.
Parameters:
| Param | description |
|---|---|
| ce | GPIO # for CE pin |
| cs | SPI Chip Select pin. For SPIDEV the mapping is (a * 10 + b) for /dev/spideva.b |
| spi_speed | Speed of the SPI interface in Hz. Defaults to 10000000 (10Mhz) |
Both parameters are mandatory. Constructor must be called with new keyword to create a new RF24 object, otherwise thiscall will produce an exception.
CE could be any available GPIO , CS pins on the contrary need to be pins that are configured in the kernel as part of the SPI interface.
Example:
// For RPI
var rf24=new nrf24.nRF24(22,0); // Rpi SPI0 with CE in PIN 15/GPIO 22 and CS0
// for SPIDEV
var rf24=new nrf24.nRF24(6,10); // OrangePi SPI1 CE=PA06 and CS=<a>*10+<b> for /dev/spidev<a>.<b>Returns: RF24 Object
Throws:: TypeError Exception if the parameters CS or CE are invalid.
destroy() Explicit destructor
Destroy the object This method must be called if its needed to reclaim the memory and resources. If there is any pending reads on the reading queue or pending async writes will be cancelled.
Example:
let rf24=new nrf24.nRF24(22,0);
...
// Do radio work
rf24.destroy(); // After this call the GC will reclaim the object if needed.
// The object will become unusable at this point.Returns: none. Throws:: none.
begin(print_debug=false)
After the creation of the object it is required to call to begin. If begin initializes the hardware for transmitting an receiving.
Parameters:
| Param | description |
|---|---|
| print_debug (optional) | true/false prints RF24 debug information in stdout (it will be useful for debugging purposes). default=false |
Example:
var rf24=new nrf24.nRF24(22,0);
rf24.begin();returns: true/false success
throws: nothing
config(options,print_details=false)
Configure the radio with some generally used configuration parameters. This function must be called after calling begin().
Parameters: A sole parameter options is passed for configuration. options must be javascript object with the following properties:
| Property | description (valid values) | Default Value |
|---|---|---|
| PALevel | Transmission power (MIN, LOW, HIGH, MAX) | MIN |
| EnableLna | Enable LNA amplifier if the radio module has it | true |
| DataRate | Speed of transmission bps (2MBPS,1MBPS,250KB) | 1MBPS |
| Channel | Radio Channel (1-127) | 76 |
| CRCLength | Length of CRC checksum for data integrity checking (8bit,16bit, disabled) | CRC 16 bit |
| retriesCount | Number of transmission retries (0-15) | 5 |
| retriesDelay | Time (n+1)*250us to wait between transmission retries (0-15) | 15 |
| PayloadSize | Size of the radio frame (1-32) | 32 |
| AddressWidth | Radio Pipes address size (3,4,5) | 5 |
| AutoAck | Use Built-in ack true/false | true |
| Irq | Gpio number of IRQ line (if negative IRQ line is not ussed) | -1 |
| PollBaseTime | If IRQ is not used this the reference time in us for polling reads (>4000) | 35000 |
| TxDelay | Grace time peridod when switching from listening to writing mode in us (>4) | 250 |
All options Property are optional. Default values described above are used if not present in the options object. If any parameter is not valid default values for the parameters are used instead.
node-rf24 exports some constants to help to define:
| Item | Values |
|---|---|
| Speed | RF24_1MBPS, RF24_2MBPS,RF24_250KBPS |
| Power Level | RF24_PA_MIN,RF24_PA_LOW,RF24_PA_HIGH,RF24_PA_HIGH, RF24_PA_MAX ,RF24_PA_ULTRA |
| CRC Checking | RF24_CRC_DISABLED,RF24_CRC_8,RF24_CRC_16 |
note: 250KBPS seed is only available in nRF24L01+ variant. If your radio is a nRF24L01 this speed option will not work.
note: PA_ULTRA is the same as RF24_PA_MAX starting form version 0.1.6 for comaptibility reasons with previous versions.
The power levels correspond to the following output levels respectively:
NRF24L01: -18dBm (MIN), -12dBm(LOW),-6dBM(HIGH), and 0dBm(MAX), EnableLna affects modules with LNA
SI24R1:
- 6dBm (MIN), 0dBm (LOW), 3dBm(HIGH) and 7dBm(MAX) with EnableLna = true
- 12dBm (MIN),-4dBm (LOW), 1dBm(HIGH) and 4dBm(MAX) with EnableLna = false
The second parameter print_details is optional boolean to show in stdout the configuration of the radio after config is executed. This is useful for debugging.
Example:
rf24.begin();
/* set Powe Level to maximum, set transfer speed to 250KBPS and on channel 101 */
var conf={
PALevel:nrf24.RF24_PA_MAX,
DataRate: nRF24.RF24_250KBPS,
Channel: 101
};
rf24.config(conf); // Configuration will be applied.Returns: nothing
Throws: Syntax Error exception if errors of on parameters are found.
present()
Check if radio is connected. This function must be called after begin to work properly.
parameters: none.
Example:
rf24.begin();
console.log("Radio connected:" + rf24.present()); // Prints true/false if radio is connected.Returns: true/false (if radio is connected)
Throws: nothing.
isP()
Check if the connected radio is nRF24L01+ variant.This function must be called after begin to work properly.
parameters: none.
Example:
rf24.begin();
console.log("Is + Variant:" + rf24.isP()); // Prints true/false if radio is + VariantReturns: true/false (if radio is + variant)
Throws: nothing.
powerUp() / powerDown()
Disable/enable radio saving energy when not in use. By Default after begin()the radio will be powered up. Note that no information can be received or transmitted but in exchange the power consumption of the radio will be less than 1uA(sleep mode).
Note that if you are listening for radio frames via read() API you must call stopRead() before put the radio to sleep. Conversely if there are pending async writes the API stopWrite() must be called before the radio can be powered down.
parameters: none.
Example:
rf24.begin();
// radio is UP
rf24.powerDown();
// Radio is asleep
...
rf24.read(...);
// After registeting reading callbacks radio will remain allwayson
...
rf24.stopRead();
rf24.stopWrite();
rf24.powerDown();
// Radio is asleepReturns: nothing.
Throws: nothing.
addReadPipe(addr,auto_ack=default value)
Before being able to receive any frame a reading pipe must be registered. A reading pipe is a one-way address-based radio tunnel that need to be used by the transmitter to communicate with the receiver. In a typical radio communication the receiver will 'listen' on a predefined pipe address and the transmitter will 'send' to the same predefined address.
For a two-way communication to be possible the transmitter reading pipe needs to be the same to the receiver writing pipe and vice versa. This two cross-pipe configuration enable seamless two-way transmissions.
nRF24 library provide 5 available reading pipes to listen numbered from 1 to 5.
caveat: First Reading pipe registered can have any valid address (pipe 1). Pipes 2-5 addresses must have the same first bytes equal to the 1st reading pipe and can only change the last byte of the address.
parameters:
| parameter | description |
|---|---|
| addr | a string with the hexadecimal format "0x#######". If the radio is configured with AddressWidth=5 the string must have 12 char. if AddressWidth=4 10 chars and if AddressWidth=3 8 chars. |
| auto_ack (optional) | true/false nRF24 support to send ACK to the transmitter by the hardware. |
if auto_ack is not provided the default value provided in config will be used.
Example:
rf24.begin();
var pipenr=rf24.addReadPipe("0xABCD11FF55");
if(pipenr==-1) console.log("Error!!!");
else console.log("Pipe opened" + pipenr);
...Returns: (number) -1= No pipe is available. 1-5 number of pipe opened to read.
Throws: SyntaxError if parameters are invalid.
removeReadPipe(pipenr)
Deregister a pipe to read from. This function can be used to reconfigure close reading pipes registered with addReadPipe.
parameters:
| parameter | description |
|---|---|
| pipenr | pipe number descriptor returned by addReadPipe |
returns: nothing
throws: SyntaxError if parameters are invalid.
changeReadPipe(pipenr,auto_ack,maxmerge)
Change the configuration of the a reading pipe. It should be called after addReadPipe only.
parameters:
| parameter | description |
|---|---|
| pipenr | pipe number descriptor returned by addReadPipe |
| auto_ack | true/false nRF24 support to send ACK to the transmitter by the hardware. |
| maxmerge | Maximum number of frames to merge in a single read event on the pipe. |
maxmerge is special parameter that can be used in streaming use cases. This parameter inform the reading loop that the user will accept merging consecutive frames on the pipe (up to the maximum number of frames specified). Note that this value is maximum value and do not guaranteed that the incoming frames will be merged.
example:
var pipenr=rf24.addReadPipe("0xABCD11FF55");
if(pipenr>0) {
rf24.changeReadPipe(pipenr,false,10);
// Disble Ack and allow the libray to merge up to 10 consecutive frames on the pipe.
}
returns: nothing.
throws: SyntaxError if parameters are not valid.
read(rcv_callback,stop_callback)
Register async callback for receiving information over the radio. This will enable the radio to receive frames from other radios. Reading pipes registered via addReadPipe will be used.
Note: Have in mind that read callback is unique for all pipes and is not possible to register several call-backs. If read is called multiple times only the first one will used. To register another callback stop_read() must be called and then another call to read() will be successful.
parameters:
| parameter | description |
|---|---|
| rcv_callback | function(array data, int items) that will called back on reception of any valid frame from the radio. |
| stop_callback | function(bool stopped,bool by_user, int error_count) that will be called back when by some reason we have stopped listening. |
both parameters are mandatory.
caveat: This API has change from previous verions. Now it allow to perform only one callback for all pending packets at once. This will increase the performance of the library reducing the number of callbacks to the js userland.
example:
rf24.begin();
var pipe1=rf24.addReadPipe("0xABCD11FF55");
var pipe2=rf24.addReadPipe("0xABCD11FF56");
rf24.read( function (data,items) {
for(var i=0;i<items;i++) {
if(data[i].pipe==pipe1) {
// received from 0xABCD11FF55
// data[i].data will contain a buffer with the data
...
}else if (data[i].pipe == pipe2) {
// rcv from 0xABCD11FF56
}
}
},
function(stop,by_user,err_count) {
...
});returns: nothing
Throws:: SyntaxError if parameters are invalid.
stopRead()
Stop listening for radio frames from the radio. This function is intended halt any further reading, however, as read mechanism is async it is possible that any pending read is delivered to reading callback. After successful halt of reading operation a stop_callback will be called, at this point no further frames will be received in rcv_callback .
This function will take more than 200ms to complete blocking your JS code. Therefore it should be used mainly to shut down communication not being designed for switching purposes.
This function is also called automatically upon object destruction.
Note: To send frames is NOT needed to stop reading.
parameters: none.
example:
...
rf24.read( ... , ... );
// At this point rcv_callback is called once a frame is received.
...
// other code
...
// Stop reading
rf24.stopRead();returns: nothing.
throws: nothing.
useWritePipe(addrs,auto_ack=default_value)
Define the output pipe to write to. nRF24L01 have only one output pipe with pipe number 0. This call is the counter part of addReadPipe in the transmitter side. All comments about pipes explained there applies also to this pipe.
parameters:
| parameter | description |
|---|---|
| addr | a string with the hexadecimal format "0x#######". If the radio is configured with AddressWidth=5 the string must have 12 char. if AddressWidth=4 10 chars and if AddressWidth=3 8 chars. |
| auto_ack (optional) | true/false nRF24 support to wait to ACK from the transmitter by the hardware. |
if auto_ack is used the default value provided in config will be used.
Example:
rf24.begin();
rf24.useWritePipe("0xABCD11FF55");
...
rf24.write(...) // This will be written to '0xABCD11FF55'Returns: nothing
Throws: SyntaxError if parameters are invalid.
changeWritePipe(auto_ack,stream_maxsize)
Changes write pipe configuration. This API must be called after useWritePipe.
parameters:
| parameter | descripton |
|---|---|
| auto_ack | true/false nRF24 support to wait to ACK from the transmitter by the hardware |
| stream_maxsize | Maximum size in bytes of buffer in stream mode. |
The maximum buffer is reset to a default value of 1204 bytes after calling to useWritePipe so to change it this function must be called every time the writting pipe is changed. Note also that the write() function ignores the parameter stream_maxsize and it will be only applicable using the stream() API (see below).
returns: Nothing
throws: SyntaxError if parameters are invalid.
write(buffer,wr_callback optional)
Send data over the radio in sync or async mode. If sync mode used wr_callback function must not be provided but the execution of JS code will block until transfer is finished. This could take up to 4ms for a 32 byte frame that could be acceptable or not depending on the use-case.
parameters:
| parameter | description |
|---|---|
| buffer | node js buffer with the data to transmit. |
| wr_callback | callback function for async write |
if buffer size is > Payload size the call will not fail but only the bytes in the buffer that fit in one frame will be transmitted.
wr_callback is a regular js callaback with the following parameters:
- success: true/false
- tx_ok: number of frames transmitted ok.
- tx_bytes: number of bytes transmitted ok.
- tx_req: number of frames requested to transmit.
- frame_size: size of the frame in bytes
- abort: true/false if the transmission was aborted by user.
example: sync mode:
if(rf24.write(Buffer.from(<data>)))
console.log("WR OK!");
else
console.log("Failed!");asyc mode:
rf24.write(Buffer.from(<data>),function(success,...){
if(success) console.log("WR OK!"); else console.log("Failed!");
});returns: true/false success for sync write. true/false async job successfully created.
throws: SyntaxError if parameters are invalid.
stream(buffer,wr_callback)
Stream has the same semantics of write but it has its differences:
- Stream can send bigger buffers. Up to the size defined in
stream_maxsizeparameter of thechangeWritePipeAPI call. - Stream is async only.
- If auto ACK is enabled if any frame in the stream failed(after predefined retries) the whole buffer will be fail. This mean that the receiver will receive frames until the first fail.
parameters:
| parameters | description |
|---|---|
| buffer | nodejs buffer with the data. If buffer is bigger than stream_maxsize the call will not fail but only the stream_maxsize will be transmitted. |
| wr_callback | callback function for async write |
wr_callback has the same specification of write function.
example:
rf24.changeWritePipe(true,2048); // Set max stream size to 2Kb
var big_buffer=Buffer.from(<data_up_to_2K>);
rf24.stream(big_buffer,function(success,tx_ok,tx_bytes,tx_req,frame_size,aborted) {
if(success) console.log("Stream ok");
else {
console.log("Transfered:"+tx_bytes+ " total:" + tx_req + " OK->" + tx_ok);
}
});returns: true/false async job successfully created.
throws: SyntaxError if parameters are invalid.
stopWrite()
Abort any pending async write. If the transmission has been already started the write will not be aborted, only pending writes.
If write is aborted by the parameter abort in the write/stream callback functions will be true.
returns: Nothing. throws: Nothing.
hasFailure()
Get a boolenan indicator if failure has been detected in the radio. (This is experimental feautre)
returns: true/false throws: Nothing
restart()
Reinit the radio maintaining the configuration and open pipes. Calling this funcion after detecting a failure may reset the de radio and enable graceful recovery of comunications. (This is experimental feature)
returns: nothing throws: nothing
getStats(optional pipe)
Get internal transfer stats. # represents the number of frames received or transmitted.
If pipe is not provided the follwing object is returned:
rf24.getStats();
// => { TotalRx: # , TotalTx_Ok: # , TotalTx_Err: # , PipesRx:[#,#,...] , Failure: # }if pipe=0 the stats retuned are those of the writing pipe with the follwing format:
rf24.getStats(0);
//=>{ TotalTx_Ok: # ,TotalTx_Err: # }if pipe >0 && <5 a number with the number of frames received is returned.
rf24.getStats(pipe)
// => #returns: number of frames recevied if pipe>1, if pipe=0 or not provided object with the stats.
throws: Nothing.
resetStats(optional pipe)
Reset to 0 internal transfer stats. if pipe is not selected all stats will be cleared.
| parameter | description |
|---|---|
| pipe | pipe nr to reset if not set all pipes will be cleared. pipe=0 write pipe / pipe=RF24_FAILURE_STAT reset failure counter |
returns: nothing. throws: nothing.
RF24Mesh API
TODO
RF24Gateway API
TODO
TODO
Assure RF24Lib is built with FAILURE_HANDLINGImplement FAILURE_HANDLING auto-recovery.Implement FAILURE stats.Test bindingsMigrate to NAN >2.8 to support queued async msg passing.Implement setWriteAck for write pipe.Change build script to not install globally the libraries (.so) in the system and link them locally inside the package (rpath)- Implement MeshStats and non blocking behavior for begin,nodeID and Send.
- Remove try_abort hack on mesh and gateway.
- Refactor Mesh for async only API
- Document Mesh
- Document Gateway.
Get rid off try_abort hack (pending nRF24 lib release)Benchmark transfer speeds.- Implement CPU-friendly streaming (pending nRF24 lib release)
Implement IRQ management.-
Benchmark IRQ performance.-> Will respond on 300-400us basis. (1-2 retries) Implement traffic stats- ~~Update base RF24 library to new verions (1.3.3 & 1.3.4 do not work)
Distribute arm32 & arm64 prebuilds with prebuidify
Change log
-
V0.2.0-beta
- Bump base library versions to RF24_VERSION="v1.4.2", RF24N_VERSION="v1. 0.16" and RF24M_VERSION="v1.1.6"
- optimize configuration function.
- Now requires nodejs >=12.
- Includes precompiled binaries for Node 12,14,16 in platforms arm32 & arm64.
-
v0.1.6-beta
- Bump of base libraries to version 1.3.9 (RF24), 1.0.13 (RF24N) , 1.1.3(RF24M) #20
- Speed of SPI interface is now configurable in the constructor. #15
- Now the module is tested to compile against node versions 10, 12, 14 on arm32 and arm64 environments.
- Fix compilation on node version 8
- Added EnableLna for better support radio boards with amplifiers and Si24R1 clones.
- Some doc improvements
-
v0.1.5-beta
- Now RFLibs are linked statically avoiding to install library system-wide.
- Improved documentation + added experimental support for autoRecovery.
- Now the library is compatible and tested with node lts versions: 8 , 10 , 12
- Added travis automatic build to test compilation in all supported node versions.
- Fixes in v8 data conversion using isolates and Nan helpers.
- As nan-marshal is not updated the module do not depend on this module anymore: Nan-marshal code is include with the project as a header file and has been adpated to have compativility with node 10 and 12.
-
v0.1.4-beta
- Fix build pull request #14
-
v0.1.2-beta
- Bump to version of mesh library to 1.0.7 (#12)
-
v0.1.1-beta
- Documentation improvements
- Compilation of RFLibs to specific releases to assure stability
- Force compilitation of RF24Lib with FAILURE_HANDLING activated.
- Refactor IRQ management.
- Added new Api
hasFailure -
getStats&resetStatsreport failure detection stats.
-
v0.1.0-beta
- Documentation improvements.
- Make nrf24 objects persistent with Ref(). Added destroy() method to Unref() and free object.
- IRQ Line support.
- Implement basic RF24 statistics.
- Polling time can be configured via
config - Configure TxDelay via
config - Implement async write and steam write.
- This Release include breaking changes in read API
-
v0.0.0-alpha4
- Documentation improvements.
- Basic RF24 additional Testing
- Migrated to NAN 2.10.0: Async workers now are queued so no data loss in nodejs.
- Cleaned RF24Mesh for after testing.
- Test/Example modification to arduino RF24 common pins.
- Added License
-
v0.0.0-alpha3
- Include bindings package to resolve package name
- Basic RF24 Working stable.
- RF24Mesh in testing.
- RF24Gateway in development.
-
v0.0.0-alpha1 & 2 versions: Initial implementation of Basic Radio.